
【導讀】智慧城市這幾年有一個挺明顯的悖論:攝像頭越裝越多,平臺越做越“智能”,但真正能在現場把問題解決掉的系統,并沒有按比例變多。更現實的情況是——城市里“看見”的能力已經很強,但“看懂并立刻行動”的能力,仍然是短板。
問題卡在哪?不是算法不夠先進,而是整套視頻系統的基礎架構,仍然停留在一個很傳統的邏輯:視頻先集中,再分析,最后再反饋。
這個鏈路在數據規模較小時沒問題,但當城市級視頻系統進入高密度部署階段,它的問題就會變得非常工程化:延遲、帶寬、成本、合規,每一項都在擠壓系統的可用性。
也正是在這個背景下,一類基于FPGA SoM的邊緣架構開始進入實際項目層面。
以瑞蘇盈科Pluto XZU20 SoM為代表的方案,關注點已經不再是“把視頻處理得更快一點”或“模型精度再提高一些”,而是把問題往前推了一步:
視頻流在邊緣側是否能夠被直接轉化為可用的信息單元,而不是僅僅作為待分析的數據輸入。
這個變化,看起來不大,但對系統架構的影響是連鎖的。
一、行業的真實矛盾:視頻系統越來越“重”,但決策越來越“慢”
如果把現在的城市視頻系統拆開看,本質上仍然是一條非常標準的鏈路:
采集 → 上傳 → 云端分析 → 返回結果
這條路徑的問題不在“能不能跑”,而在“跑起來之后的代價”。
首先是帶寬。高清視頻流24小時持續上傳,在城市級規模下,對網絡資源的消耗是線性的疊加,而不是簡單的設備增加。
其次是延遲。即使云端算力再強,鏈路結構決定了它天然存在反饋滯后。很多場景下,系統給出的已經不是“正在發生”的判斷,而是“剛剛發生過”的解釋。
再往后是成本和合規問題。數據集中存儲與處理,在越來越嚴格的隱私監管環境下,本身就是一個持續增加的約束條件。
所以行業逐漸形成一個共識:問題不只是“算得夠不夠快”,而是系統本身是否適合做實時決策。
二、變化的起點:計算開始從云端回到現場
這幾年一個比較明顯的趨勢是,越來越多的AI推理開始從云端往邊緣遷移。
但早期的邊緣方案,更多是在“減負”——把部分計算從云端挪下來,減少帶寬壓力。但系統結構本身沒有改變。
真正的變化,是當邊緣設備開始具備完整的AI推理能力之后,邏輯發生了反轉:
系統不再是“把視頻送上去再分析”,而是在產生視頻的地方就完成理解。
這也是瑞蘇盈科 Pluto XZU20 SoM這類SoM方案開始被關注的原因之一。
它的意義不在于單點性能,而在于它把一整套視頻分析鏈路壓縮到了邊緣節點內部完成。
Pluto XZU20核心板+Pluto ST11底板
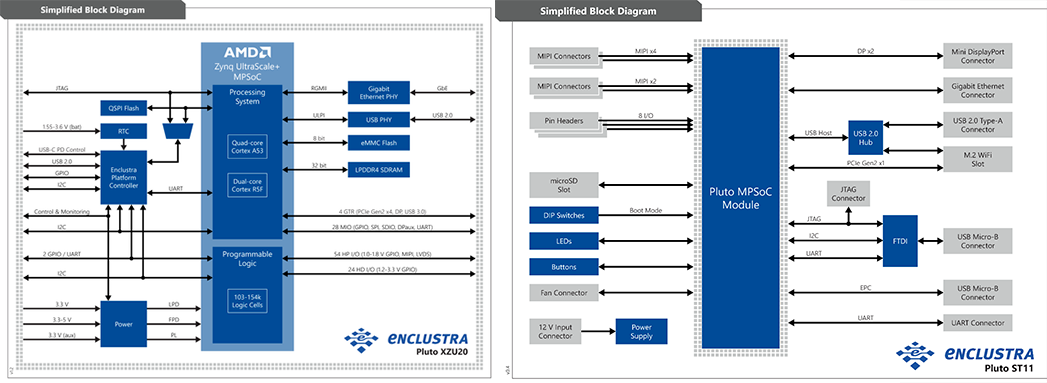
Pluto XZU20+Pluto ST11結構框圖
三、從“視頻流”到“情報流”:變化發生在數據形態上
如果只看功能描述,這類系統通常包括人流統計、行為識別、交通監測、異常檢測等能力。
但更關鍵的變化,其實發生在輸出端。
傳統系統輸出的是視頻或圖像流,本質上仍然是“原始數據”。而基于Pluto XZU20的邊緣AI系統輸出的是結構化結果:
人流密度變化
區域擁堵指數
異常行為標簽(徘徊、跌倒、沖突等)
目標識別結果
也就是說,系統不再傳輸“畫面”,而是直接傳輸“判斷結果”。
這一步的影響是直接的:
上層平臺不再需要“再看一遍視頻”,而是可以直接基于結果做決策。
四、為什么是FPGA SoM,而不是GPU方案?
從外部視角看,邊緣AI似乎用GPU也可以實現類似能力,但在實際工程場景中,FPGA SoM的價值更偏“系統約束優化”,而不是算力對比。
以Pluto XZU20這類架構為例,它的優勢更多體現在三個現實維度:
第一,確定性延遲。
在交通、安全這類系統中,穩定的響應時間比峰值性能更重要。FPGA的硬件級數據路徑減少了調度不確定性。
第二,多模型并行的結構化隔離。
視頻分析往往是多模型協同工作,而不是單一模型運行。FPGA可以在硬件層實現任務隔離,避免資源爭搶。
第三,功耗與部署形態。
邊緣設備不是數據中心,功耗、體積、散熱都是硬約束。SoM形態更適合規模化鋪設。
換句話說,這類方案解決的不是“算力問題”,而是系統能不能穩定跑在現場的問題。
五、系統級變化:從“中心分析”到“節點決策”
當邊緣節點具備完整分析能力之后,系統結構會發生一個更底層的變化:決策權下沉。
過去的邏輯是:
攝像頭 → 云端 → 決策中心 → 下發指令
現在開始變成:
攝像頭節點 → 本地分析 → 本地響應 + 云端匯總
這個變化看起來只是“少走了一段網絡”,但本質上是架構重構。
城市系統的實時性,不再由中心算力決定,而是由邊緣節點的處理能力決定。
這意味著一個更現實的結果:城市系統開始變成一個由大量“本地智能節點”組成的網絡,而不是一個中心化的大腦。
六、產業影響:變化不在設備,而在系統邊界
如果把這類SoM放在產業鏈里看,它帶來的變化不止是設備升級,而是三個邊界的重新劃分:
第一,視頻系統從“存儲導向”轉向“計算導向”。
視頻的價值不再是“留存”,而是“即時使用”。
第二,AI從“云端集中部署”轉向“邊緣分布式推理”。
模型不再集中運行,而是分散在各個節點。
第三,系統集成復雜度下沉到邊緣層。
競爭不再只是算法,而是多模型調度、實時性和穩定性。
這些變化疊加起來,本質上是在重寫智慧城市視頻系統的底層邏輯。
結語:真正的變化,是視頻不再只是“記錄工具”
回到最初的問題:智慧城市到底缺什么?
從技術上看,不缺攝像頭,不缺模型,也不缺算力。真正缺的,是一個能在現場做判斷的系統結構。
基于瑞蘇盈科 Pluto XZU20 SoM的邊緣架構,做的事情其實很樸素:把視頻處理從“事后分析”,拉回到“現場理解”。
它沒有改變視頻本身,但改變了視頻在系統中的角色——
從“被記錄的數據”,變成了“直接參與決策的輸入”。
而這一步,才是從視頻到情報的真正分界線。





